深圳先进院:液态金属柔性可拉伸传感器取得新进展
2019-04-12 15:59:51
作者:本网整理 来源:深圳先进技术研究院
近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所微创中心在超高可拉伸柔性传感器的研究领域取得新进展,相关论文Microchannel Structural Design For a Room-Temperature Liquid Metal Based Super-stretchable Sensor(基于微通道结构设计的室温液态金属超高可拉伸传感器研究)在Scientific Reports期刊在线发表( DOI: 10.1038/s41598-019-42457-7)。该论文提出了一种微通道的优化设计,提高基于液态金属柔性可拉伸传感器的灵敏度。论文第一作者是深圳先进院客座硕士研究生高钦武,通信作者是王磊研究员和李晖副研究员。
柔性传感器是可穿戴医疗、机器人等领域的研究热点。柔性应变传感器已经成为未来发展智能器件的重点研究方向,其在人机交互系统、电子皮肤、人体运动行为监测系统等领域具有广阔的应用前景。其中,可拉伸性、灵敏度、稳定性、可靠性和舒适性是应变传感器的重要性能指标,如何在实现高可拉伸性的同时大幅度提高灵敏度和可重复性仍然是目前面临的一个挑战。
为此,该课题组成员提出了一种基于微通道的优化设计、利用液态金属制备的柔性可拉伸传感器的方法。研究团队利用有限元仿真优化结果,设计制备柔性可拉伸传感器,实验结果表明该柔性传感器可在590%的拉伸,270o扭转和180o弯曲的情况正常工作。当拉伸550%,灵敏度GF可达4.95,拉伸重复率误差<0.1%,为实现人体手指、手腕等关节等运动精准测量提供了可行性方法,充分展示了其在柔性可穿戴电子设备领域的良好应用价值。
该研究得到了国家自然科学基金-深圳机器人联合基金重点支持“穿戴式精确定位介入手术机器人的力觉感知与导丝操控机理(U1713219)”等项目的资助。
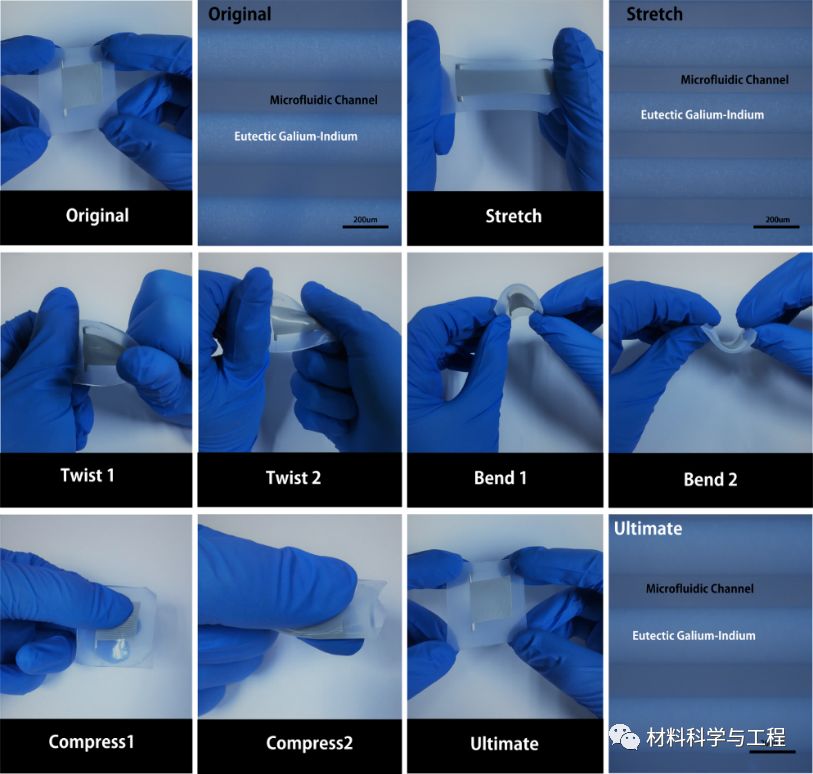
柔性传感器的拉伸、扭转和弯曲
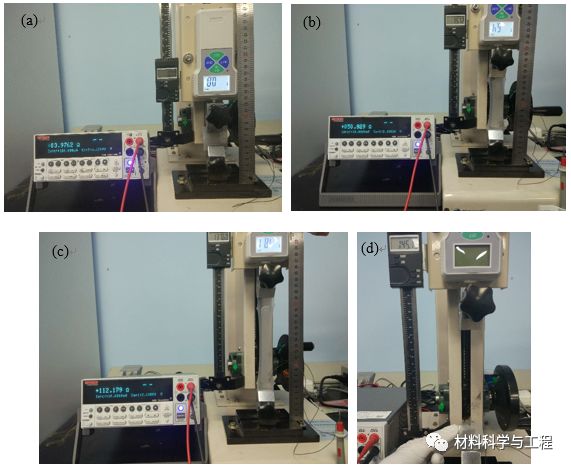
超高可拉伸传感器的拉伸实验
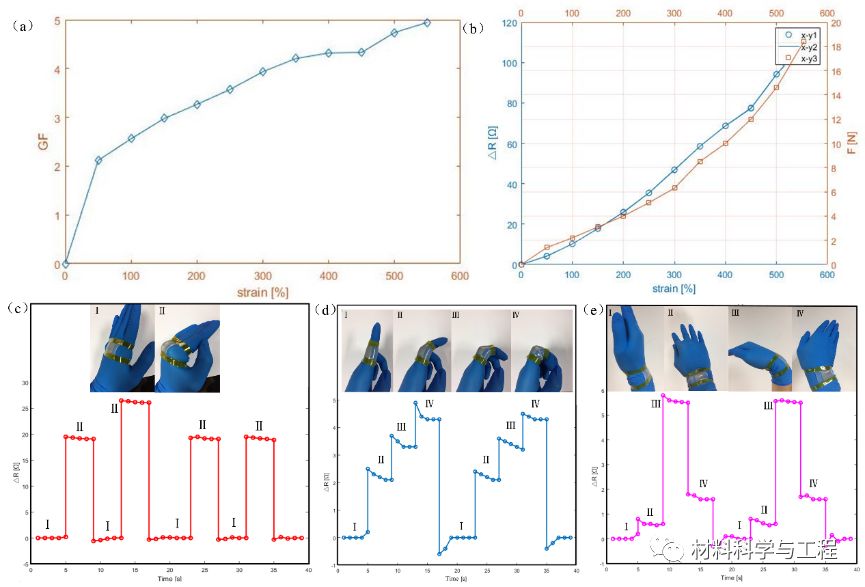
可拉伸传感器的特性分析和应用示范
免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。